Applications
Collaborative Robots
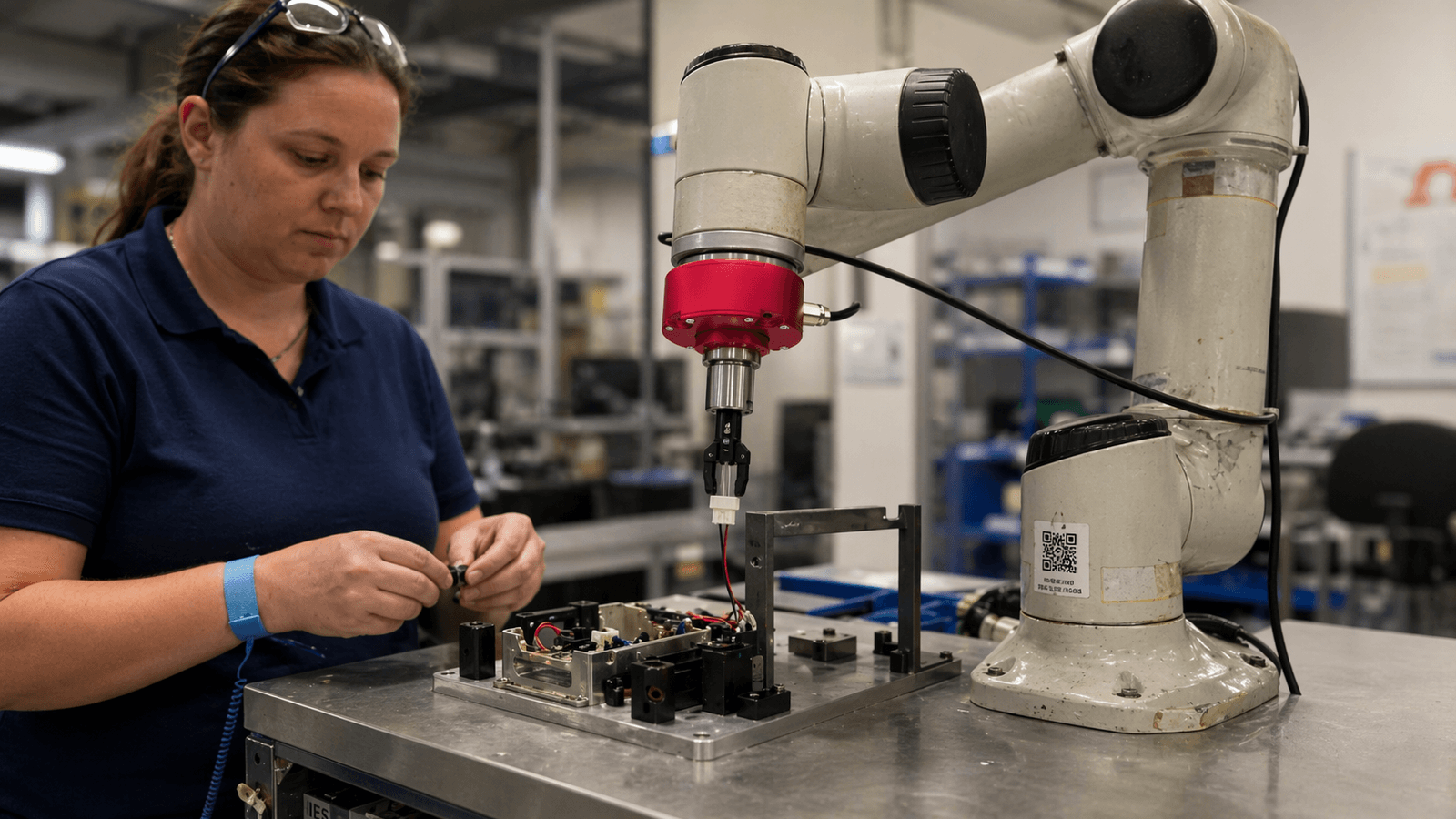
Safe human-robot interaction, force-limited assembly, and adaptive process control for cobots.
Shared Workspace Safety
Collaborative robots operate alongside humans without cages. ISO/TS 15066 specifies transient contact force limits by body region (e.g. 65 N at the skull, 140 N at the chest). Joint torque estimates cannot reliably resolve end-effector contact forces to this precision; an external 6-axis sensor at the flange provides direct measurement. AXIOM-500 at 0.025 N force resolution resolves contacts well below these thresholds.
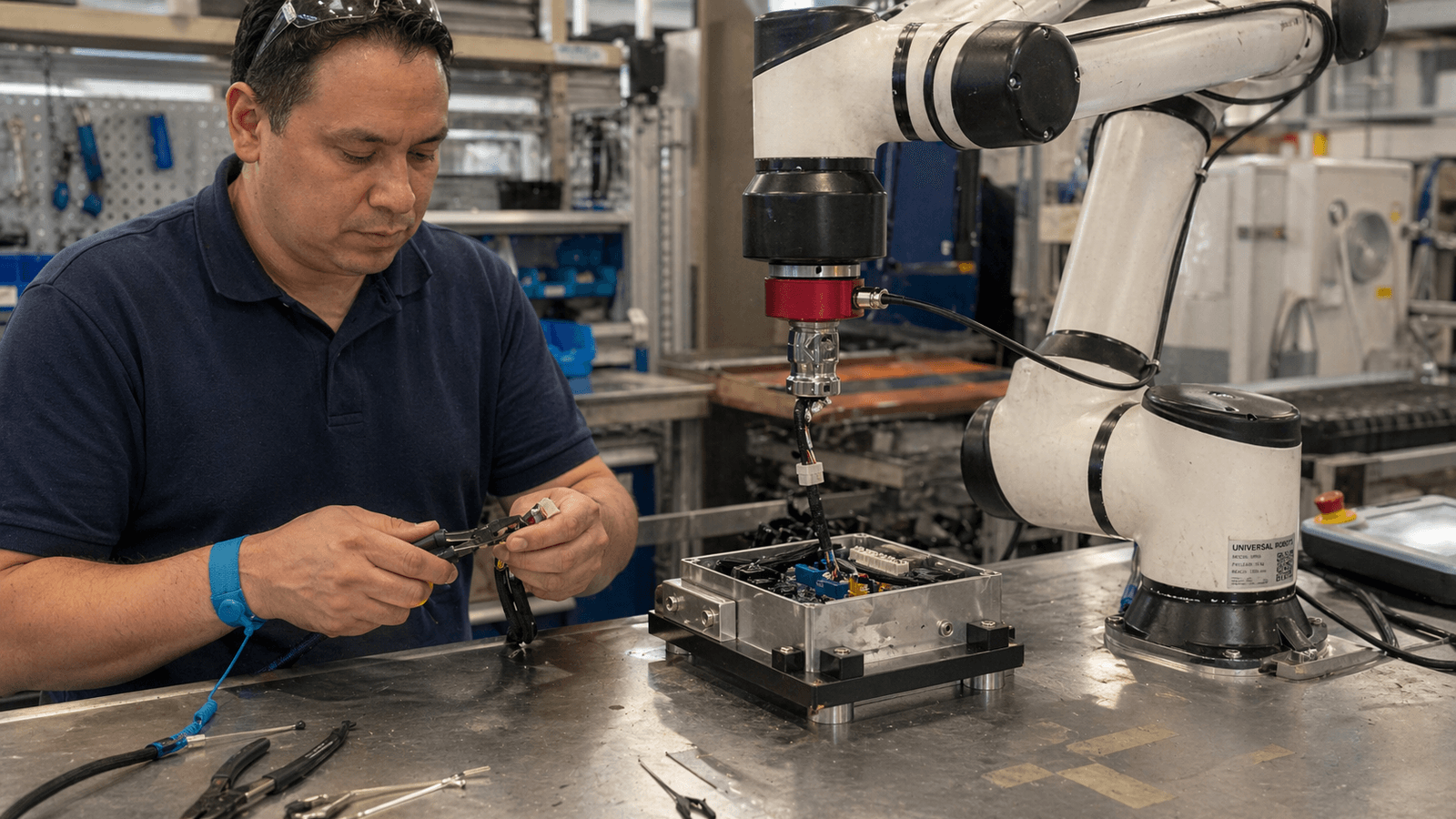
Force-Controlled Assembly and Process Adaptation
Insertion, snap-fit, and press-fit operations require closed-loop force control to hit force-displacement signatures reliably across part tolerance bands. IP67 sealing and a -20 °C to +60 °C operating range let AXIOM sensors deploy in wash-down cells and temperature-variable environments without additional enclosures. The 100 / 250 / 500 Hz configurable output rate matches the cobot's control cycle without overloading the fieldbus.
Key Metrics
65 N
ISO/TS 15066 Skull Contact Limit
IP67
Environmental Protection
0.025 N
Force Resolution (Fx/Fy, AXIOM-500)
Challenges
- Motor-current-based force estimation has cumulative error across the kinematic chain; by the time it resolves at the end effector, it cannot reliably distinguish tool-contact from payload inertia at low forces.
- Cobot payload budgets are tight — adding a sensor that consumes 10–15% of available payload undermines the flexibility argument for cobots in the first place.
- Assembly processes must tolerate part-to-part variability; a purely position-controlled insertion strategy fails when tolerance bands stack.
Outcomes
- Direct 6-axis measurement at the flange replaces motor-current estimation with traceable, low-noise contact force data for safety and process control in the same sensor.
- Single-cable RS-485 connection and integrated electronics keep the add-on mass at 200–350 g depending on model — within cobot payload margins for most UR, Franka, and KUKA iiwa platforms.
Recommended Products
Recommended
AXIOM-500Coming Soon
Compact, low-range 6-axis force-torque sensor for collaborative robotics and precision assembly.
Recommended
AXIOM-1000
Mid-range general-purpose model balancing force capacity and measurement resolution.
View Product
Related
Humanoid Robotics
6-DOF sensing at 500 Hz in a 200 g package lets humanoid controllers close force loops fast enough to react to unexpected ground contact within a single control cycle.
Whole-body contact feedback, balance stabilization, and reactive manipulation for humanoid platforms.
Related
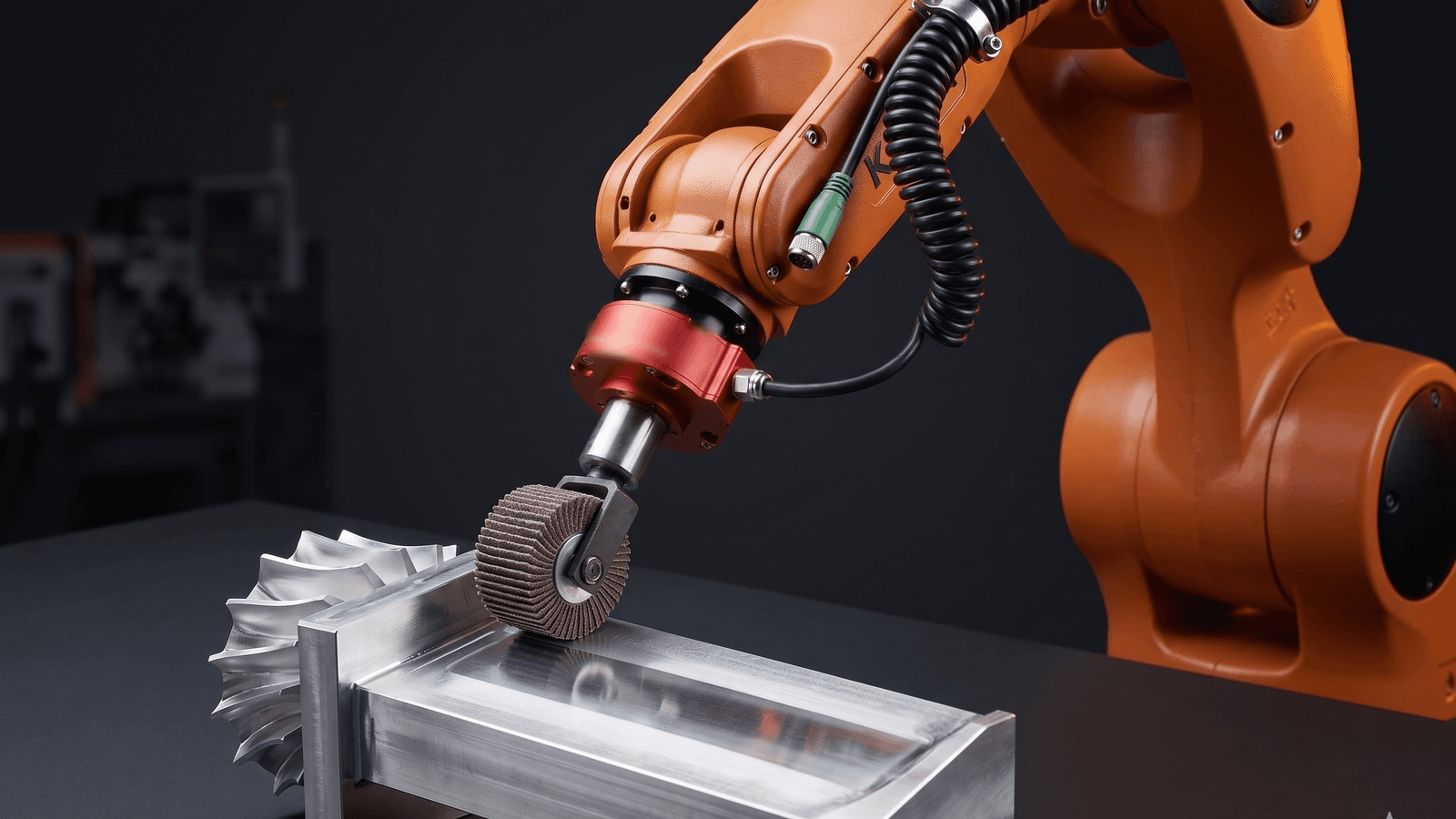
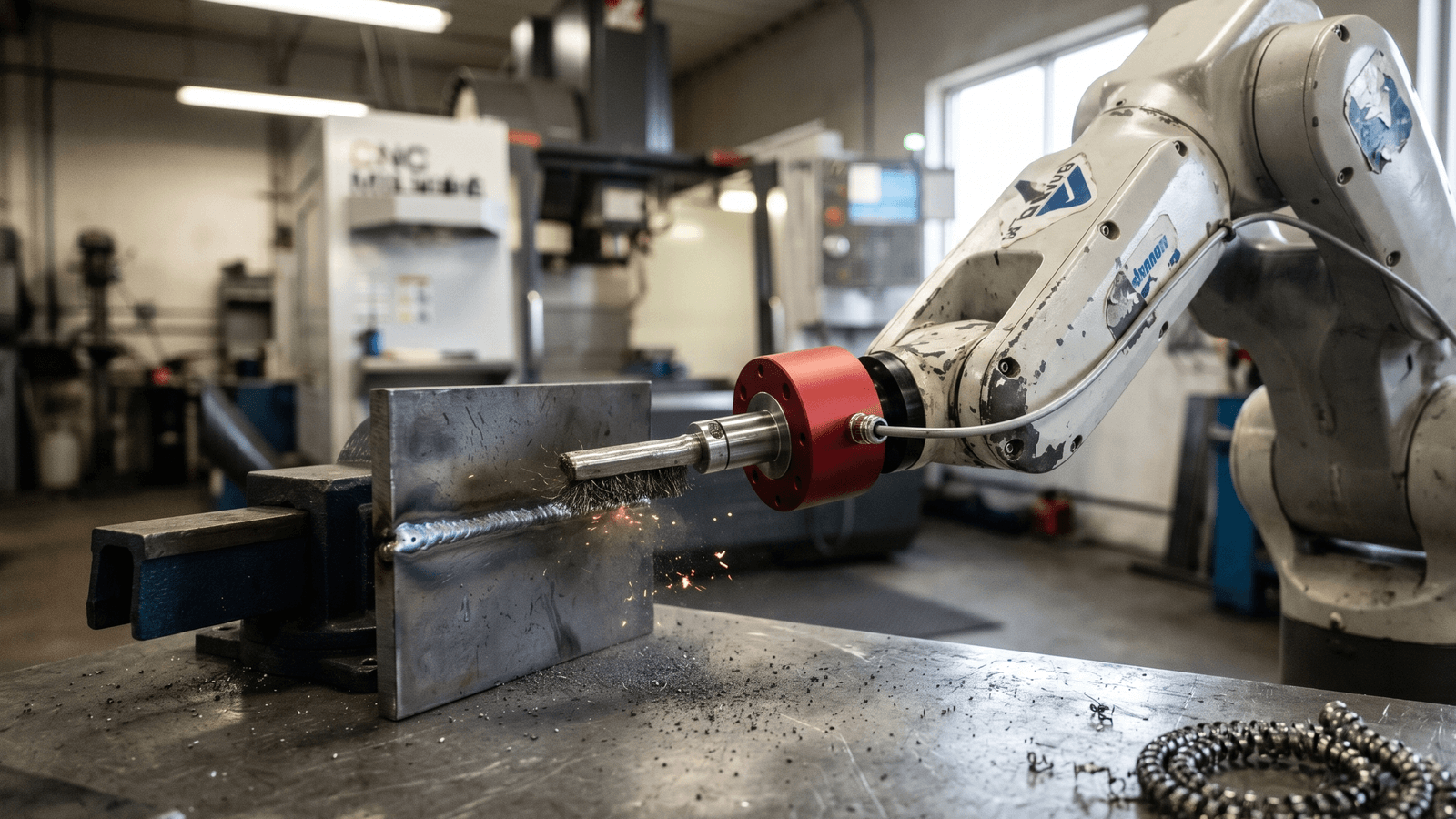
Industrial Automation
Constant-force grinding and polishing with a ±2,000 N sensor and closed-loop force control eliminates tool-wear drift — a process variable that position programming cannot compensate.
Process monitoring, quality control, grinding, polishing, and machine tending in production environments.
Discuss Your Application
Share your requirements and environmental constraints for a tailored sensor recommendation.
Contact Us