Applications
Research
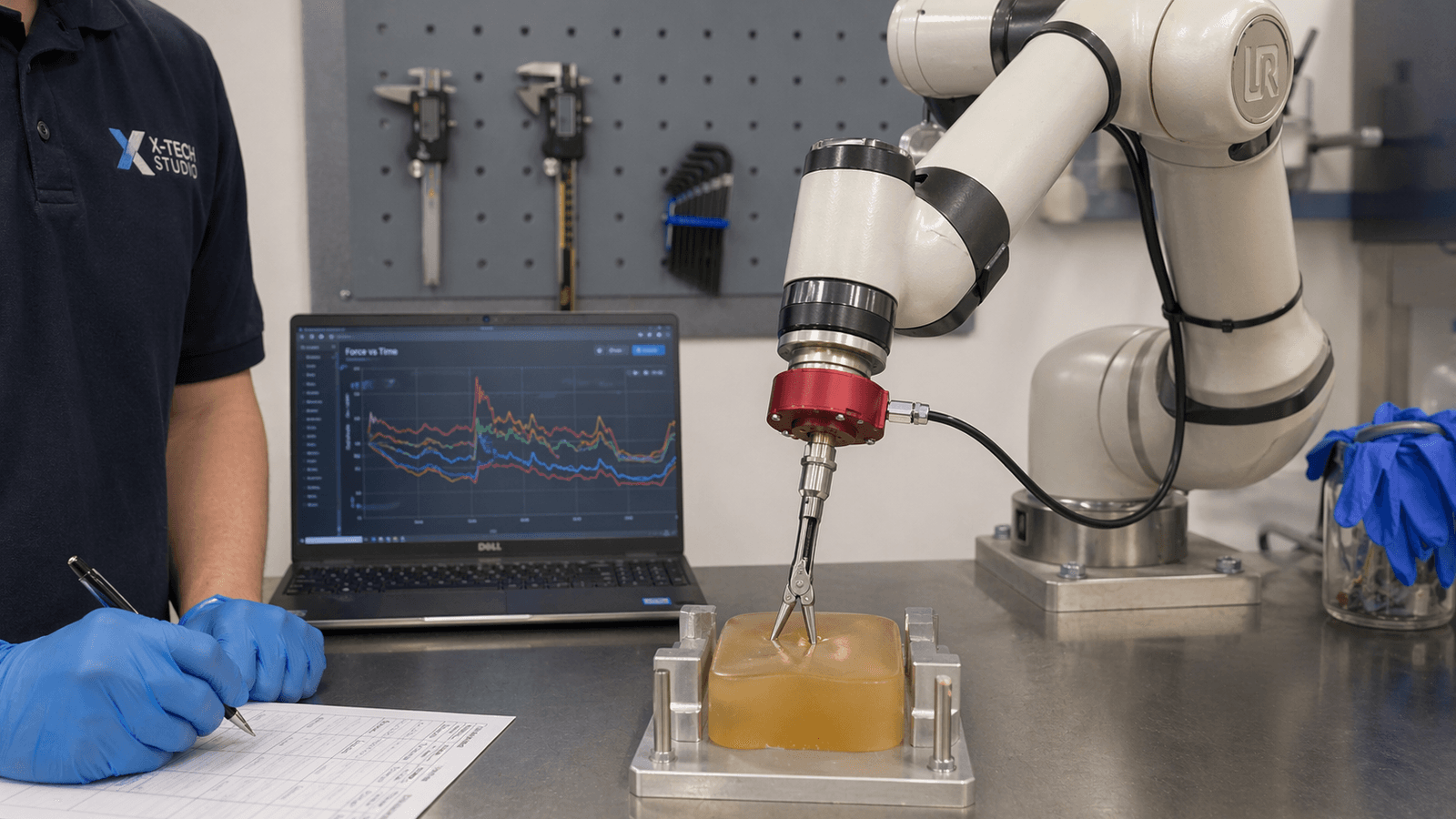
Tactile learning, biomechanics, material characterization, and robotic manipulation experiments.
Reproducible Force Data for Experimental Work
Research reproducibility depends on sensor consistency across runs, setups, and labs. Force-torque data with uncorrected axis coupling, temperature drift, or run-to-run offset variation creates systematic error that contaminates learned policies and invalidates comparative studies. AXIOM sensors ship with individual calibration transforms that compensate 6×6 cross-coupling; the same transform applies on every power cycle, keeping inter-run variance below sensor noise.
Tactile Learning and Sim-to-Real Transfer
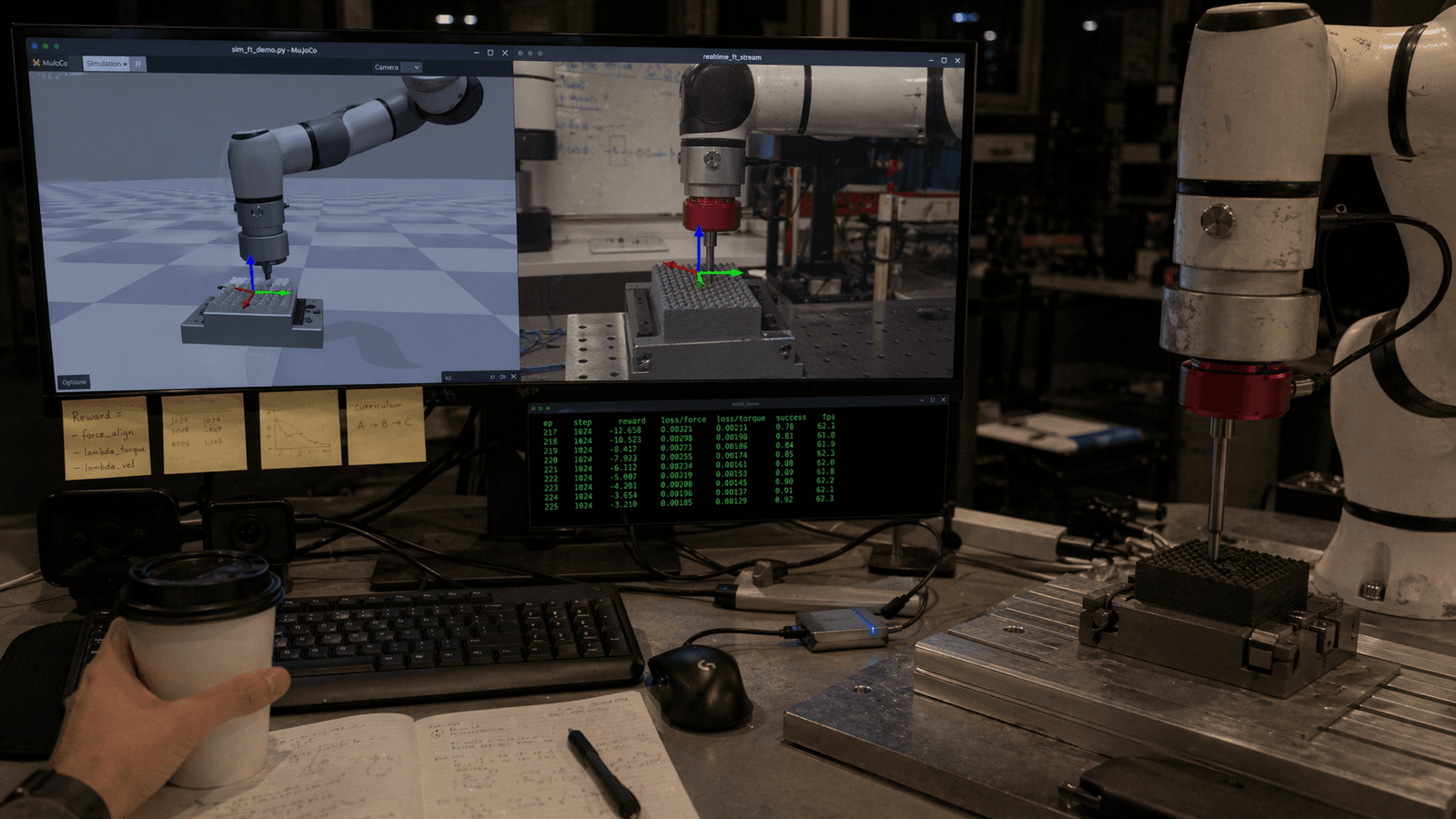
Sim-to-real transfer for contact-rich manipulation requires that training data collected in simulation and real data collected on hardware share the same statistical properties. Sensors with inconsistent noise floors or calibration drift between sessions widen the reality gap. The AXIOM-500's 0.025 N resolution and 500 Hz output produce high-fidelity contact streams that train policies on the same contact transitions the sim model generates — reducing the domain randomization budget.
Key Metrics
500 Hz
Max Output Rate
0.025 N
Force Resolution (Fx/Fy, AXIOM-500)
6-DOF
Axes per Sensor
Challenges
- Tactile learning datasets must be consistent across collection sessions months apart; sensors with thermal drift or non-repeatable offset require per-session calibration that researchers rarely perform rigorously.
- Biomechanics and material characterization experiments apply combined loads; single-axis load cells report spurious signals when off-axis loads are present, requiring expensive multi-sensor rigs that AXIOM replaces with one unit.
- Budget constraints at academic labs make per-unit calibration certificates and long-term stability important — a sensor that degrades within a grant cycle forces mid-study replacement.
Outcomes
- Factory calibration with per-unit 6×6 compensation matrix eliminates sensor-to-sensor variation across multi-unit lab deployments and removes a systematic error source from tactile datasets.
- Single-cable RS-485 at 5 V DC reduces integration effort between experiments — no external amplifier box, no multi-rail power supply, no axis-by-axis wiring.
Recommended Products
Recommended
AXIOM-500Coming Soon
Compact, low-range 6-axis force-torque sensor for collaborative robotics and precision assembly.
Recommended
AXIOM-1000
Mid-range general-purpose model balancing force capacity and measurement resolution.
View Product
Related
Humanoid Robotics
6-DOF sensing at 500 Hz in a 200 g package lets humanoid controllers close force loops fast enough to react to unexpected ground contact within a single control cycle.
Whole-body contact feedback, balance stabilization, and reactive manipulation for humanoid platforms.
Related
Medical & Surgical
0.025 N force resolution at 500 Hz output rate enables instrument testing and research platforms to characterize sub-Newton tissue interaction forces that conventional load cells cannot resolve.
Haptic feedback, tissue interaction control, rehabilitation sensing, and instrument force characterization.
Discuss Your Application
Share your requirements and environmental constraints for a tailored sensor recommendation.
Contact Us